TMR角度传感器的输出延迟和角度误差之间的关系
在旋转运动过程中检测角度时,例如在电机位置控制中,必须考虑传感器的输出延迟时间。
如果使用响应差的传感器,则在相对于真实角度的输出延迟时间内观察过去的角度信息,并且基于过去角度信息的控制可能会导致电机噪音的产生。
因此,本文解释了TMR角度传感器的输出延迟与角度误差之间的关系。
以下两个因素决定了模拟输出TMR传感器的输出延迟时间
- 1. TMR元件对所施加磁场变化的时间响应
- 2. 整个传感器电路对电气变化的时间响应。
对于第一个因素,对磁变化的响应性,很难观察到磁场变化,
但对于我们在硬盘驱动器领域的TMR传感器而言,我们有信号读数超过1GHz的产品记录,因此可以说该技术具有足够的响应能力。
第二,电路响应性,以我们的TAS2141-AAAA为样本的测量结果显示。
如图1所示,一个Tr = 0.616 nsec,1 Vp-p的脉冲被输入到Vcc引脚,观察传感器输出的响应、上升时间Tr =10.93 nsec≥带宽32 MHz得到确认。
这个输入-输出传播延迟时间是由于TMR传感器内部电路的电阻和寄生电容的时间常数造成的。
如果使用两极传感磁铁,这意味着可以处理高达1,920Mrpm的超高速范围内的信号,对于大多数角度检测需求来说,由于输出延迟时间导致的角度误差小得可以忽略不计。
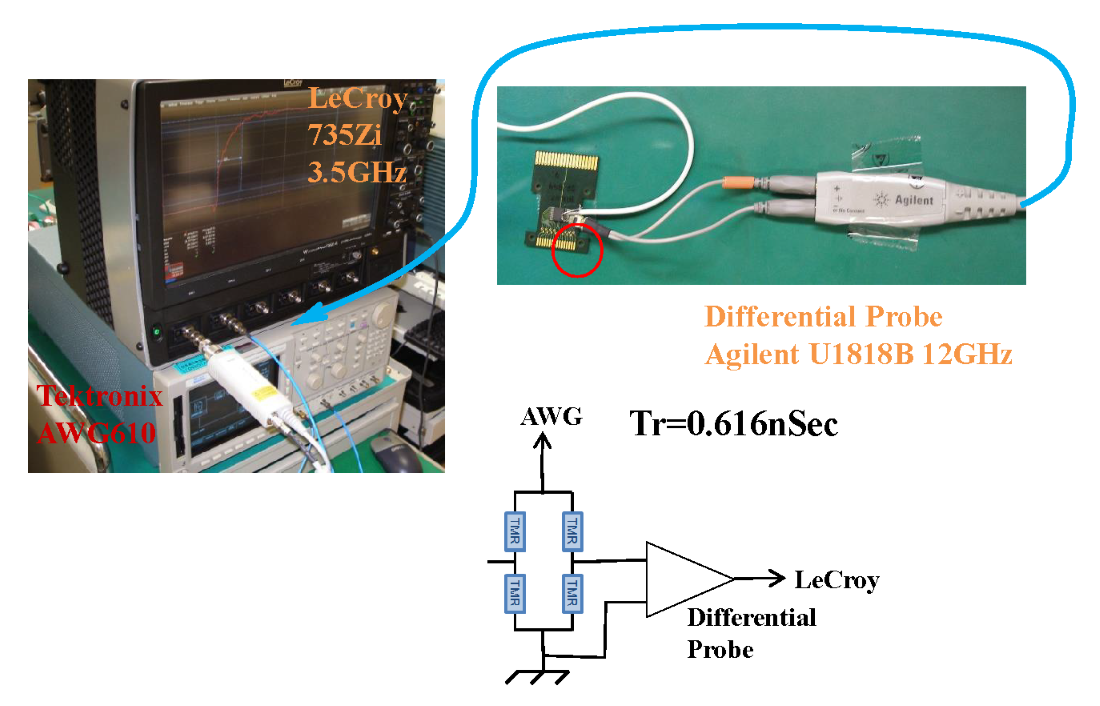
图1:模拟输出产品的输出响应的测量环境
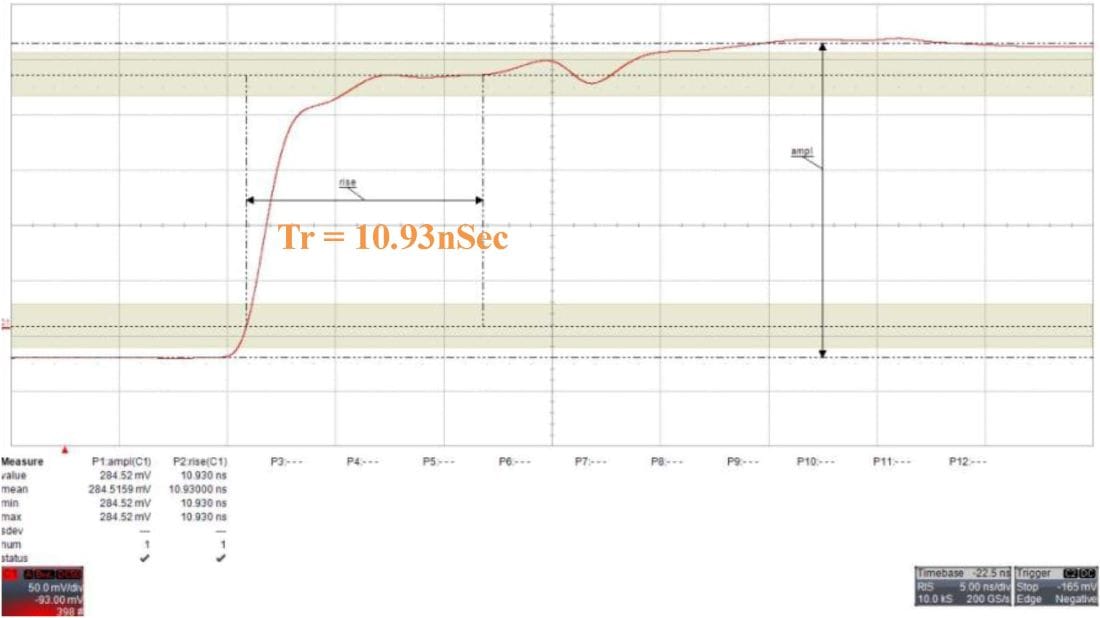
图2:模拟输出产品的输出响应 上升时间Tr =10.93nSec
补偿数字产品输出延迟的预测特性
另一方面,数字输出传感器除了考虑模拟因素外,还必须考虑到ASIC的计算过程所造成的输出延迟。
如果输出延迟时间较长,就会担心角度误差会增加,所以TDK的数字输出传感器具有输出延迟预测功能,这样就可以在未来的输出延迟时间内输出,表现得像没有延迟一样。
下面的表1和图3显示了有预测功能和没有预测功能时,由于输出延迟时间而产生的角度误差。
| 旋转速度 [rpm] |
转动周期 [μS] |
角度误差[deg] | |
|---|---|---|---|
| 没有预测, 延迟 225μs (最大值) |
有预测的情况下、 延迟5μs (最大值) |
||
| 1,000 | 60,000 | 1.4 | 0.0 |
| 5,000 | 12,000 | 6.8 | 0.2 |
| 10,000 | 6,000 | 13.5 | 0.3 |
| 16,667 | 3,600 | 22.5 | 0.5 |
| 20,000 | 3,000 | 27 | 0.6 |
| 33,333 | 1,800 | 45 | 1.0 |
| 66,667 | 900 | 90 | 2.0 |
| 100,000 | 600 | 135 | 3.0 |
表1. 输出延迟时间导致的角度误差
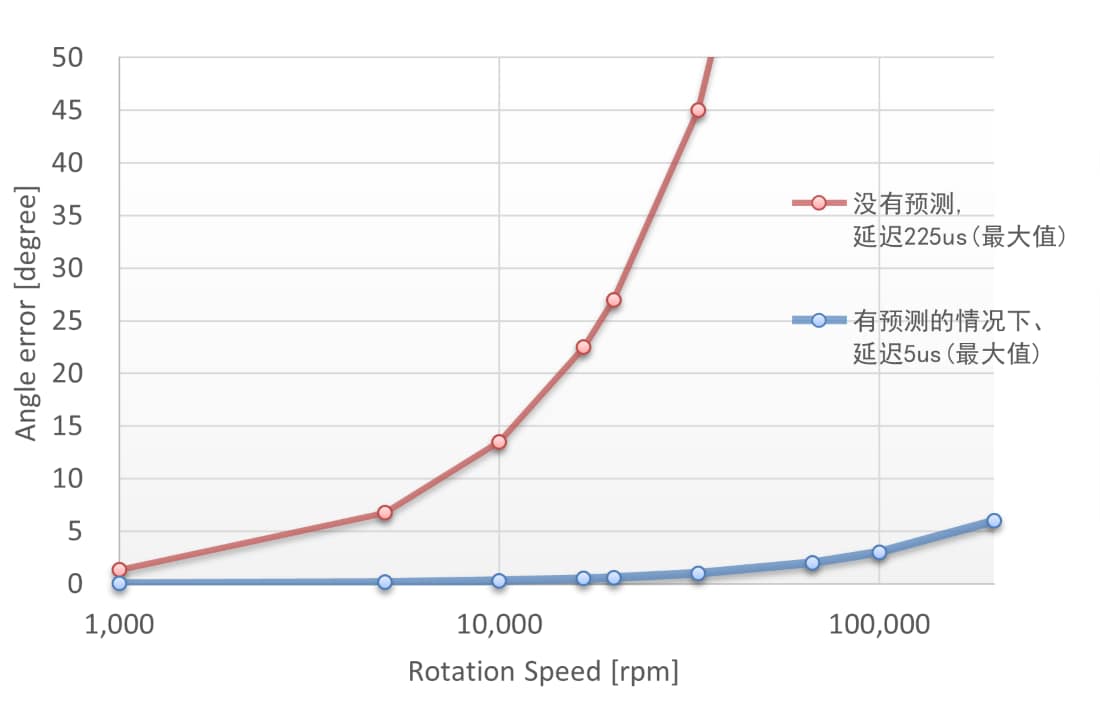
图3:输出延迟时间导致的角度误差
[公式]
输出延迟时间导致的角度误差[度] = 360[度] *延迟时间 / 旋转周期
结论:
TDK模拟输出产品具有足够高的输出响应速度,它们可以在没有任何输出延迟时间措施的情况下使用,有助于降低成本。
由于TDK数字输出产品的预测功能,在使用时不会因为输出延迟时间而使角度误差恶化。
相关信息
相关产品
-
TAD2141-BAAA
TMR角度传感器
Digital Output SPI/PWM
TSSOP-16Redundancy=No
0 (Single)
角度精度(整体温度范围)=+/-0.3 deg -
TAS2141-AAAB
TMR角度传感器
Analog Output 1.5Vp-p (Differential Sin+ - Sin- / Cos+ - Cos-, 5.0V applied) TSSOP-8
Redundancy=No
0 (Single)
角度精度(整体温度范围)=+/-0.6 deg -
TAS2142-AAAC
TMR角度传感器
Analog Output 3.0Vp-p (Differential Sin+ - Sin- / Cos+ - Cos-, 5.0V applied) TSSOP-8
Redundancy=No
0 (Single)
角度精度(整体温度范围)=+/-0.6 deg -
TAS2143-AAAA
TMR角度传感器
Analog Output 3.0Vp-p (Differential Sin+ - Sin- / Cos+ - Cos-, 5.0V applied) TSSOP-8
Redundancy=No
0 (Single)
角度精度(整体温度范围)=+/-0.8 deg
如有问题、要求、样品、评估板要求等,请联系我们。
一些传感器产品也没有在网上列出。欲了解更多信息,请联系您当地的销售代表。





